
Motivation
Nodes sind in ROS die wichtigsten Bausteine, da sie Sensoren und Aktoren in der Software abstrahieren.
In ROS 1 waren Nodes einfach „da“. Sobald sie mit rosrun gestartet wurden, liefen sie. Stoppen bzw. Pausieren konnte man sie nur über Signale wie
SIGINT (STRG + C) oder SIGTSTP (STRG + Z)
In ROS 2 ermöglichen Lifecycle Nodes eine genaueer Steuerung. Man kann nun:
- Nodes nur aktivieren, wenn sie bereit sind
- Parameter vor der Aktivierung laden
- Knoten schrittweise prüfen
- Nodes ohne Neustart zurücksetzen oder neu starten
Ein Lifecycle-Node hat folgende 4 Zustände:
- Unconfigured
- Inactive
- Active
- Finalized
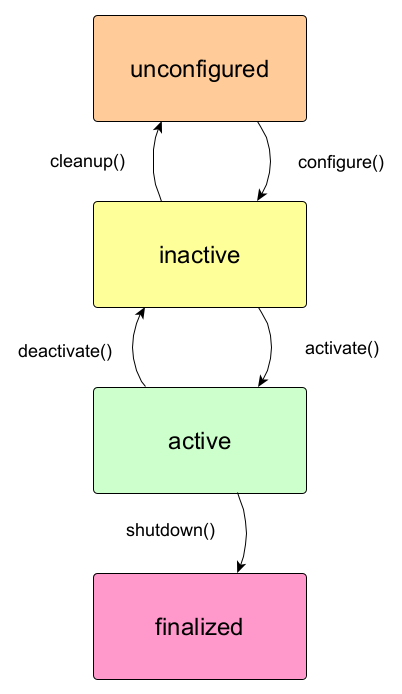
Zustände über CLI ändern
Die Zustandsübergänge lassen sich via CLI triggern.
ros2 lifecycle set /my_lifecycle_node configure
ros2 lifecycle set /my_lifecycle_node activate
ros2 lifecycle set /my_lifecycle_node deactivate
ros2 lifecycle set /my_lifecycle_node shutdownCode
Ein eigener kleiner LifecycleNode kann so implementiert werden:
import rclpy
from rclpy.lifecycle import LifecycleNode
from rclpy.lifecycle import State
from rclpy.lifecycle import TransitionCallbackReturn
class MyLifecycleNode(LifecycleNode):
def __init__(self):
super().__init__('my_lifecycle_node')
def on_configure(self, state: State) -> TransitionCallbackReturn:
self.get_logger().info('Configuring...')
return TransitionCallbackReturn.SUCCESS
def on_activate(self, state: State) -> TransitionCallbackReturn:
self.get_logger().info('Activating...')
return TransitionCallbackReturn.SUCCESS
def on_deactivate(self, state: State) -> TransitionCallbackReturn:
self.get_logger().info('Deactivating...')
return TransitionCallbackReturn.SUCCESS
def on_cleanup(self, state: State) -> TransitionCallbackReturn:
self.get_logger().info('Cleaning up...')
return TransitionCallbackReturn.SUCCESS
def on_shutdown(self, state: State) -> TransitionCallbackReturn:
self.get_logger().info('Shutting down...')
return TransitionCallbackReturn.SUCCESS
def main(args=None):
rclpy.init(args=args)
node = MyLifecycleNode()
rclpy.spin(node)
rclpy.shutdown()
if __name__ == '__main__':
main()




