
Table of Contents
Einleitung
Im letzten Teil haben wir ROS2 auf dem Raspberry zum Laufen gebracht. Jetzt widmen wir uns der Kamera.
Installation
Wir benötigen für die Kamera noch folgende Pakete:
sudo apt install raspi-config
sudo apt install libraspberrypi-bin
sudo apt install v4l-utils
sudo apt install ros-humble-v4l2-camera
sudo apt install ros-humble-image-transport-pluginsKonfiguration
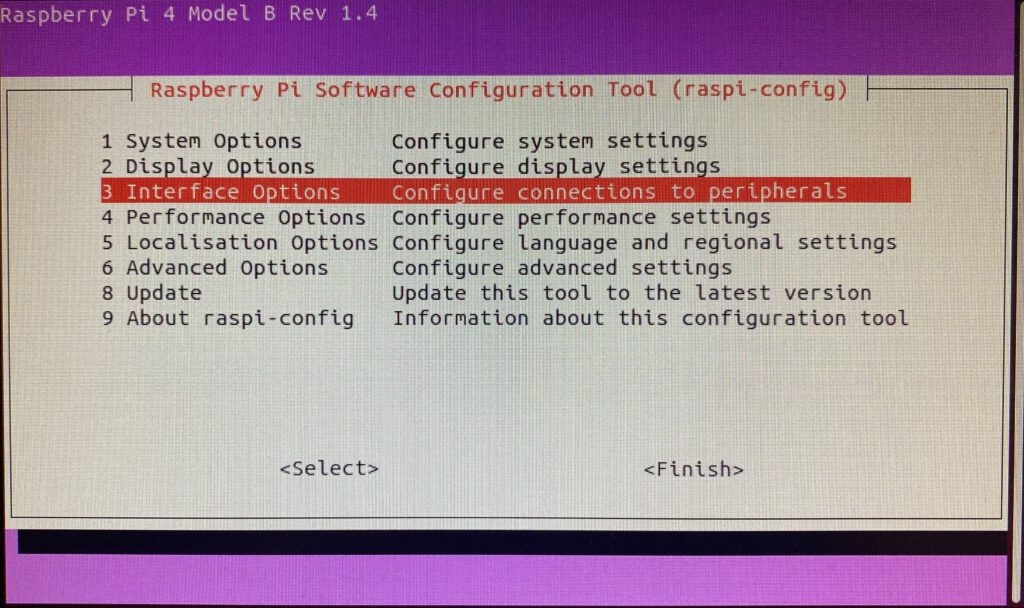
Damit unter Ubuntu 22 die Kamera benutzbar wird, müssen wir noch ein paar Einstellungen vornehmen. Öffne dazu ein Terminal und starte das Raspberry-Konfigurationstool:
sudo raspi-configGehe auf “Interface Options”:
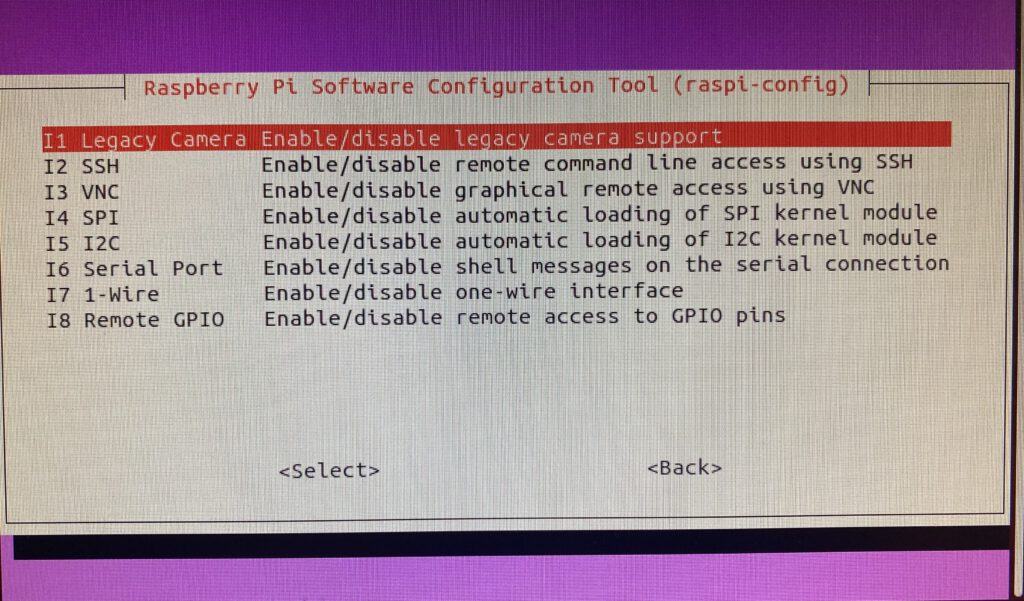
Hier aktivierst Du:
- Enable Legacy camera support
- SPI
- I2C
Mit dem groups Kommando checken wir nun, ob unser user in der Gruppe video ist. Falls das nicht der Fall sein sollte, müssen wir folgendes Kommando ausführen und einen reboot machen.
sudo usermod -aG video $USEROb das geklappt hat, können wir nun mit diesem Kommando überprüfen:
vcgencmd get_cameraJetzt sollte die Ausgabe supported=1 detected=1 erscheinen.
Test
Mit den v2l-utils können wir testen, ob die Kamera erkannt wird:
v4l2-ctl --list-devices
Nun können wir den Node v4l2_camera starten, um unser Kamerabild in die ROS-Welt zu bringen.
Öffne ein Terminal und gebe folgendes ein:
ros2 run v4l2_camera v4l2_camera_nodeDie Node published das topic /image_raw
Mit dem ROS2-Tool rqt_image_view können wir nun überprüfen, ob das funktioniert. In einem zweiten Terminal geben wir Folgendes ein:
ros2 run rqt_image_view rqt_image_view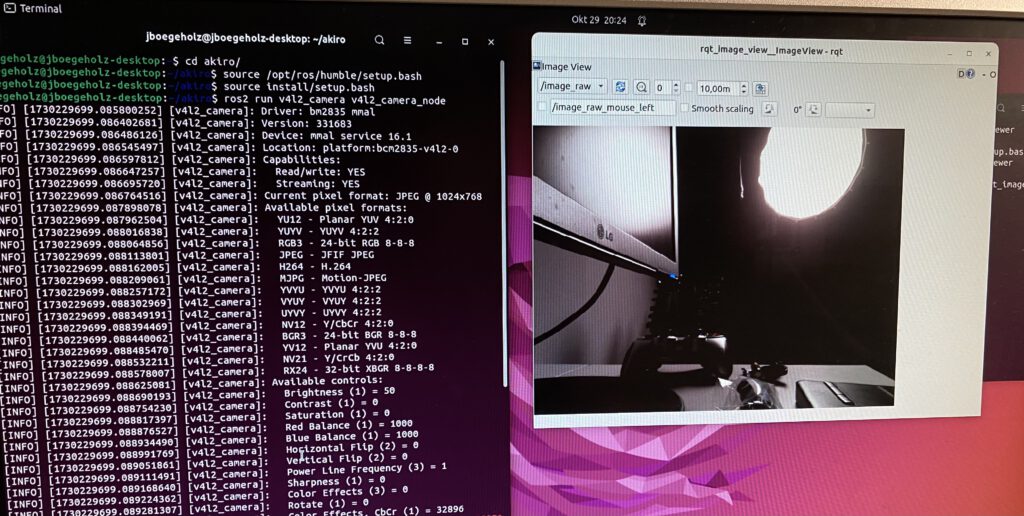
Troubleshooting
Falls Du die beiden nodes nicht starten kannst, hast du eventuell die humble-Installation noch nicht gesourct. Gebe dann
source /opt/ros/humble/setup.bashim Terminal ein, bevor Du die nodes startest.
Fazit
Wir haben die Kamera in ROS2 integriert und können nun das Kamerabild in der ROS-Welt benutzen. Im nächsten Teil werden wir uns mit dem Erstellen von Paketen und nodes beschäftigen.





