
Table of Contents
Motivation
Nachdem wir in den letzten Teilen ROS 2 und die Kamera auf dem Raspberry zum Laufen gebracht haben, widmen wir uns nun der Erstellung von Paketen und Nodes.
Voraussetzungen
Build-Tool: colcon
Damit wir Pakete bauen können, benötigen wir noch ein Buildtool. In ROS 2 löst colcon catkin als Buildtool ab.
Wir installieren es mit:
sudo apt install python3-colcon-common-extensionsDamit wir Tab-Completion für colcon-Befehle erhalten, fügen wir folgende Zeile in unsere .bashrc ein:
source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bashROS-2-Python-Abhängigkeiten
Damit wir mit Python Nodes erstellen können, benötigen wir noch die Pakete rclpy und std_msgs
sudo apt install ros-humble-rclpy
sudo apt install ros-humble-std-msgsDa rclpy Paket ist die Python Client Library für ROS; std-msgs hilft uns Nachrichten zwischen Nodes senden und empfangen zu können.
Eigenes Paket erstellen
Wir wollen zuerst ein einfaches Paket mit zwei Nodes schreiben, um den publish-subscriber-Mechanismus kennenzulernen:
Pakete sollten in ROS immer in einem src-Ordner liegen:
cd ~/akiro
mkdir ./src
cd ./srcJetzt erzeugen wir ein neues Python-Paket:
ros2 pkg create my_first_package --build-type ament_python --dependencies rclpySanity-Check
Auch wenn das Paket noch leer ist, sollte es bereits baubar sein:
cd ~/akiro
colcon buildWenn keine Fehler auftreten, ist das Setup korrekt.
Nodes schreiben
Nodes sind die ausführbaren Programme in ROS 2.
Man kann damit die Komplexität reduzieren, indem man Roboterprojekte in kleine, unabhängige Prozesse aufteilt. Nodes kapseln Funktionalität und kommunizieren über klar definierte Schnittstellen.
Nodes können in verschiedenen Sprachen geschrieben werden. (Derzeit Python und C++, Rust ist auf dem Weg) Wir wählen für unsere ersten Gehversuche Python, da es einfach zu lernen ist. Wir schreiben zwei nodes: einen Publisher und einen Subscriber
Publisher
Wir wechseln in das Python-Package my_first_package
cd src/my_first_package/my_first_packageWir erstellen eine Datei publisher.py
touch publisher.pyund fügen folgenden Code ein:
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class MinimalPublisher(Node):
def __init__(self):
super().__init__('minimal_publisher')
self.publisher = self.create_publisher(String, '/topic', 10)
timer_period = 2.0 # Sekunden
self.timer = self.create_timer(timer_period, self.timer_callback)
def timer_callback(self):
msg = String()
msg.data = 'Hello, from my first ROS 2 publisher node'
self.publisher.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg.data)
def main(args=None):
rclpy.init(args=args)
minimal_publisher = MinimalPublisher()
rclpy.spin(minimal_publisher)
minimal_publisher.destroy_node()
rclpy.shutdown()
if name == 'main':
main()
Was passiert hier?
- Der Node sendet alle 2 Sekunden eine String-Nachricht
- Das Topic heißt /talker_topic
- Die Queue-Größe (10) ist für einfache Tests völlig ausreichend
Subscriber
Für den Subscriber erstellen wir eine Datei subscriber.py im gleichen Ordner und fügen folgenden Code ein:
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class MinimalSubscriber(Node):
def __init__(self):
super().__init__('minimal_subscriber')
self.subscription = self.create_subscription(
String,
'/topic',
self.listener_callback,
10)
self.subscription # prevent unused variable warning
def listener_callback(self, msg):
self.get_logger().info('I heard: "%s"' % msg.data)
def main(args=None):
rclpy.init(args=args)
minimal_subscriber = MinimalSubscriber()
rclpy.spin(minimal_subscriber)
minimal_subscriber.destroy_node()
rclpy.shutdown()
if name == 'main':
main()
Der Subscriber lauscht auf dem gleichen Topic und gibt empfangene Nachrichten aus.
setup.py anpassen
Damit ROS 2 unsere Nodes als Programme kennt, müssen sie in der setup.py registriert werden:
'console_scripts': [
'talker = my_first_package.publisher:main',
'listener = my_first_package.subscriber:main',
],Paket bauen
cd ~/akiro
colcon buildNodes starten
Im ersten Terminal kannst du nun folgendes eingeben:
source install/setup.bash
ros2 run my_first_package talkerIm zweiten Terminal:
source install/setup.bash
ros2 run my_first_package listener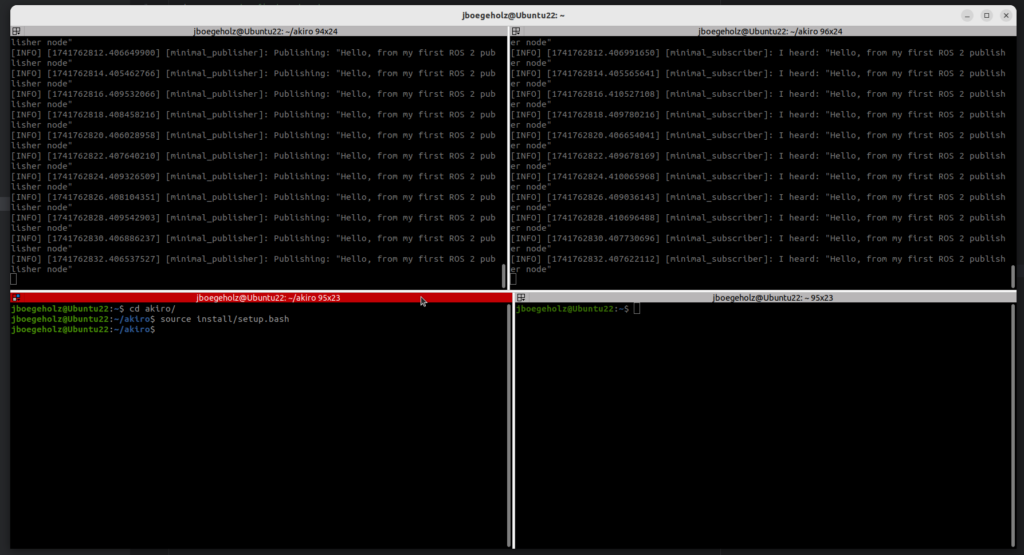 Kommunikation zwischen Nodes
Kommunikation zwischen Nodes
Publisher / Subscriber
Den Publisher / Subscriber-Mechanismus haben wir jetzt kennengelernt.
Er eignet sich für asynchrone, kontinuierliche Datenströme z. B. Kamera-Bilder, Sensordaten, Steuerbefehle
Services
sind ein weiteres Kommunikations-Protokoll in ROS nach Request / Response-Prinzip z. B. „Starte Motor“, „Setze Parameter“
Actions
eignen sich für langlaufende Aufgaben mit Feedback wie z. B. Navigation, Greifbewegungen
Kommunikation zwischen Nodes visualisieren
Um die Kommunikation zwischen den Nodes zu visualisieren, kannst du das Tool rqt_graph verwenden:
ros2 run rqt_graph rqt_graph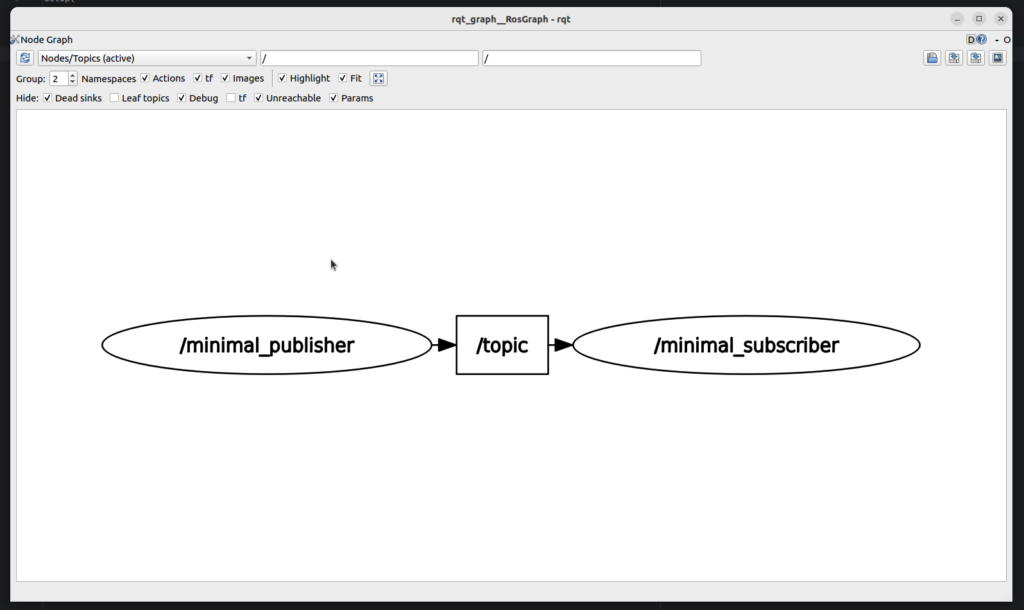 Hier siehst du:
Hier siehst du:
- Nodes (Ovale)
- Topics (Rechtecke)
- Datenfluss zwischen Publisher und Subscriber
Fazit
Du kannst jetzt:
- ROS-2-Pakete erstellen
- Python-Nodes schreiben
- Publisher & Subscriber verbinden
- Nodes bauen und starten
- die Kommunikation visualisieren
Code
https://github.com/jboegeholz/akiro/tree/main/src/my_first_package/my_first_package





