
Table of Contents
Motivation
Wenn man sich mit Robotik beschäftigt, kommt man auch mit dem Thema Lokalisierung in Kontakt. Hierzu werden oft LiDAR-Systeme verwendet.
LiDAR steht für Light Detection and Ranging und ist ein optisches Entfernungsmessgerät. Ein bekanntes LiDAR-System ist das Slamtec RPLidar A1.
In diesem Artikel zeige ich, wie man das Slamtec RPLidar A1 in ROS 2 verwendet.

 Voraussetzungen
Voraussetzungen

 Voraussetzungen
VoraussetzungenWir gehen davon aus, dass ihr eine funktionierende ROS2-Installation habt und die
source /opt/ros/
Installation
Wenn wir das Lidar zusammengebaut haben und via USB angeschlossen haben, können wir mit der Installation beginnen.
Als Erstes müssen wir den Zugriff auf das USB-Device erlauben:
sudo chmod 777 /dev/ttyUSB0Nun erstellen wir einen neuen ROS 2 Workspace und klonen das rplidar_ros-Paket von Slamtec.
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src git
clone -b ros2 https://github.com/Slamtec/rplidar_ros.gitNun bauen wir den Workspace:
cd ~/ros2_ws/
colcon build --symlink-install
source ./install/setup.bash Beispiel
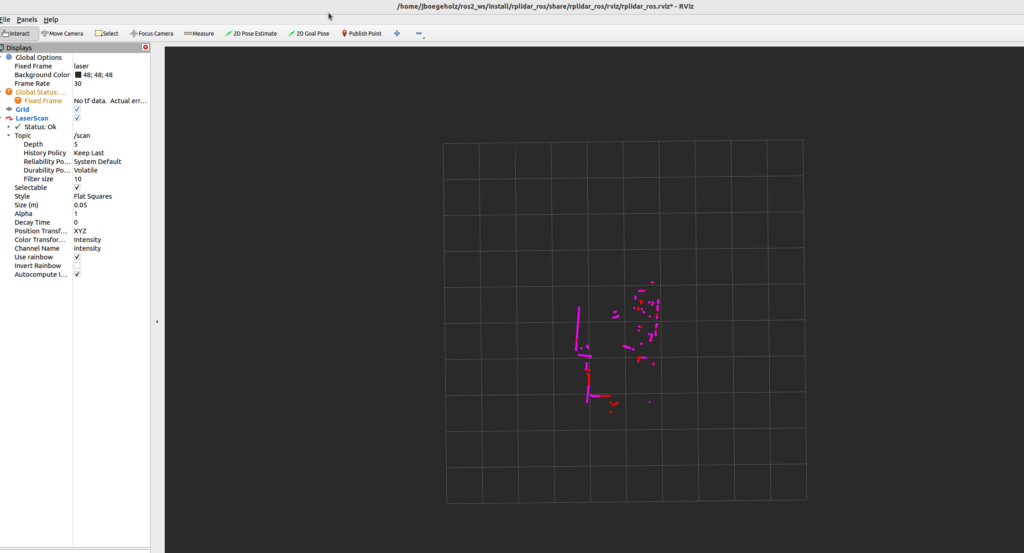
Wir können nun das Beispiel rplidar_ros2/view_rplidar_a1_launch.py starten.
ros2 launch rplidar_ros view_rplidar_a1_launch.pyDas Beispiel startet rviz und zeigt die gemessenen Punkte des Lidars an.
Fazit
Die Verwendung des Slamtec RPLidar A1 in ROS 2 ist einfach und unkompliziert.
In einem der nächsten Artikel werde ich zeigen, wie wir das Lidar am Raspberry Pi betreiben können.





