
Table of Contents
Motivation
Das teleop_twist_keyboard Paket ist eines der grundlegenden Pakete in der Robot Operating System (ROS) 1 & 2 Welt. Es ermöglicht die manuelle Steuerung eines Roboters durch Tastatureingaben.
Das Paket ist besonders nützlich für Entwickler und Forscher, die Roboter schnell und einfach steuern möchten, ohne komplexe Steuerungsalgorithmen programmieren zu müssen.
Das teleop_twist_keyboard Paket im Überblick
Das teleop_twist_keyboard Paket ist darauf ausgelegt, geometry_msgs/Twist Nachrichten zu veröffentlichen, die zur Steuerung der Bewegung eines Roboters verwendet werden.
Die Nachrichten beinhalten lineare und angulare Geschwindigkeitskomponenten, die von einem Benutzer über die Tastatur eingegeben werden können.
Installation
Um das teleop_twist_keyboard Paket in ROS 2 zu installieren, verwendest du den folgenden Befehl:
sudo apt-get install ros-<ros-distro>-teleop-twist-keyboardErsetze <ros-distro> durch den Namen deiner ROS 2 Distribution (z.B. humble, foxy, galactic).
Verwendung
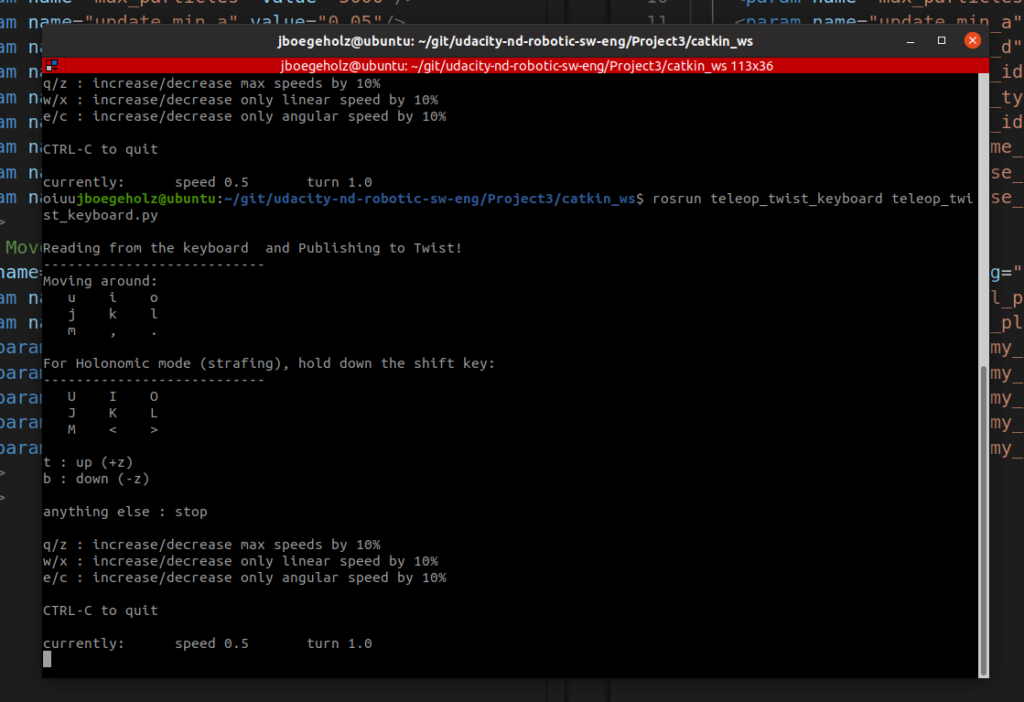
Nach der Installation können wir das Paket starten und unseren Roboter steuern. Wir verwenden dazu den folgenden Befehl:
ros2 run teleop_twist_keyboard teleop_twist_keyboardNach dem Starten dieses Befehls siehst Du folgende Ausgabe:
Funktionsweise
Das teleop_twist_keyboard Paket hört auf Tastatureingaben und wandelt diese in Twist Nachrichten um.
Diese Nachrichten werden dann auf einem bestimmten ROS 2 Topic veröffentlicht, in der Regel /cmd_vel.
Der Roboter, der diese Nachrichten abonniert, interpretiert die Daten und bewegt sich entsprechend.
Die Twist Nachricht hat die folgende Struktur:
geometry_msgs/Twist:
linear:
x: float64
y: float64
z: float64
angular:
x: float64
y: float64
z: float64Für mobile Roboter sind in der Regel nur die x Komponente der linearen Geschwindigkeit und die z Komponente der Winkelgeschwindigkeit relevant.
Anpassung und Erweiterung
Ein großer Vorteil von ROS 2 und seinen Paketen ist die einfache Anpassbarkeit. Wir können das teleop_twist_keyboard Paket an unsere speziellen Bedürfnisse anpassen.
Zum Beispiel kannst Du die Geschwindigkeitsskalen ändern oder zusätzliche Tasten für weitere Funktionen konfigurieren.
Hier ein Beispiel, wie man die Geschwindigkeitsskalen ändern kann, indem wir die teleop_twist_keyboard Python-Datei bearbeiten:
self.speed = 0.5 # Default linear velocity (m/s)
self.turn = 1.0 # Default angular velocity (rad/s)Fazit
Das teleop_twist_keyboard Paket ist ein einfaches, aber leistungsfähiges Werkzeug, um Roboter in ROS 2 zu steuern. Es ermöglicht Entwicklern und Forschern, schnell mit der Arbeit an Robotikprojekten zu beginnen, ohne sich um die Implementierung grundlegender Steuerungsmechanismen kümmern zu müssen. Mit seinen Anpassungsmöglichkeiten kann das Paket an verschiedene Anforderungen und Anwendungsfälle angepasst werden, was es zu einem unverzichtbaren Bestandteil vieler ROS 2 Projekte macht.





