
Table of Contents
Warum RQt?
Wenn du mit ROS2 arbeitest, wirst du früher oder später auf ein Tool namens RQt stoßen.
Der Name steht für „ROS Qt“ – und genau das ist es auch: eine Qt-basierte GUI-Sammlung,
die verschiedene Werkzeuge modular integriert.
Egal ob Debugging, Visualisierung oder Testen – RQt bietet dir viele praktische Funktionen direkt per Mausklick.
Installation
Wie bei den meisten ROS-Paketen kannst du RQt unter Ubuntu über apt installieren.
sudo apt update
sudo apt install ros-<ros2-distro>-rqt*Ersetze
RQt starten
RQt lässt sich ganz einfach starten mit:
rqtNach dem Start erscheint das RQt-Hauptfenster – anfangs noch leer, aber bereit für Plugins.
Konsole überwachen (Console Monitoring)
Sehr nützlich ist die integrierte Funktion, die ROS2-Konsolenausgaben zu monitoren:
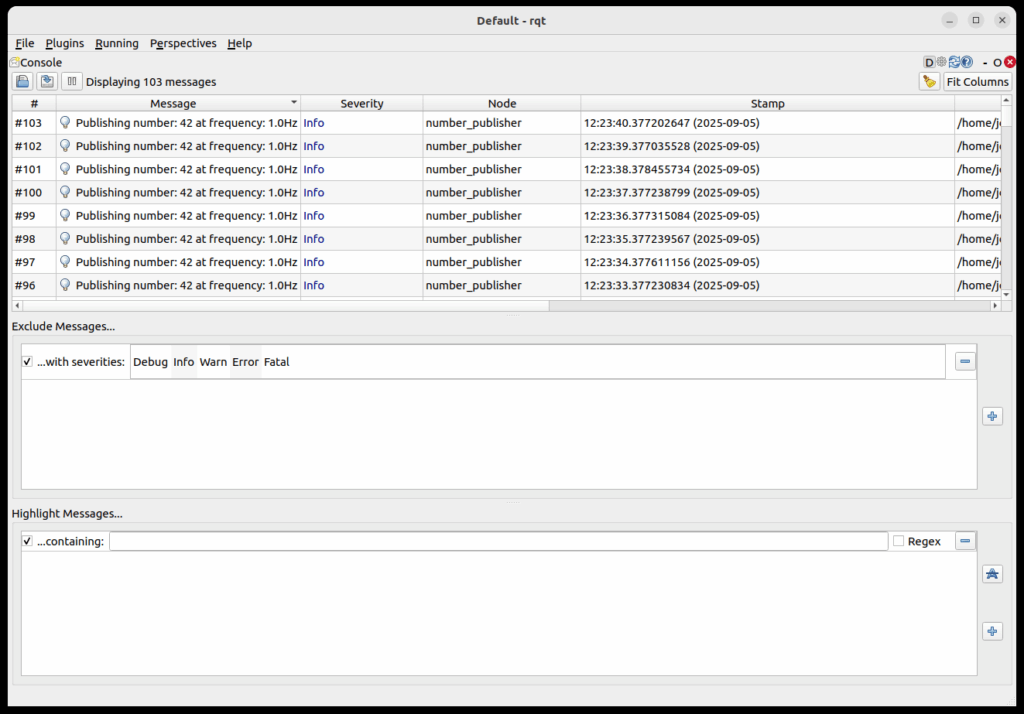
Menüpunkt
Plugins -> Logging -> Console
Topic Monitor
Alle aktiven Topics in deinem ROS2-Netzwerk kannst du mit dem Topic Monitor überwachen. Damit siehst du z. B. welche Daten gerade über
self.publisher = self.create_publisher(String, "robot_news", 10)gesendet werden.
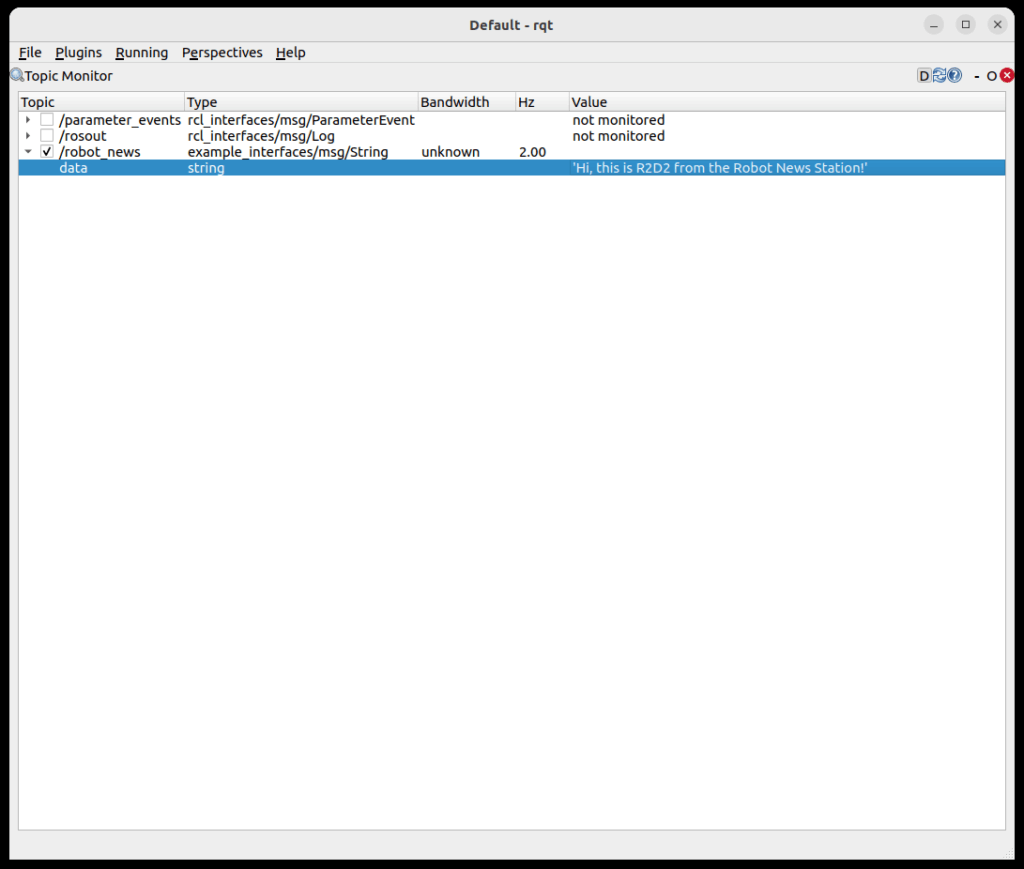
Menüpunkt
Plugins -> Topics -> Topic Monitor
Nachrichten senden (Message Publisher)
Natürlich kannst du auch selbst Nachrichten auf ein Topic publizieren – direkt aus der GUI heraus!
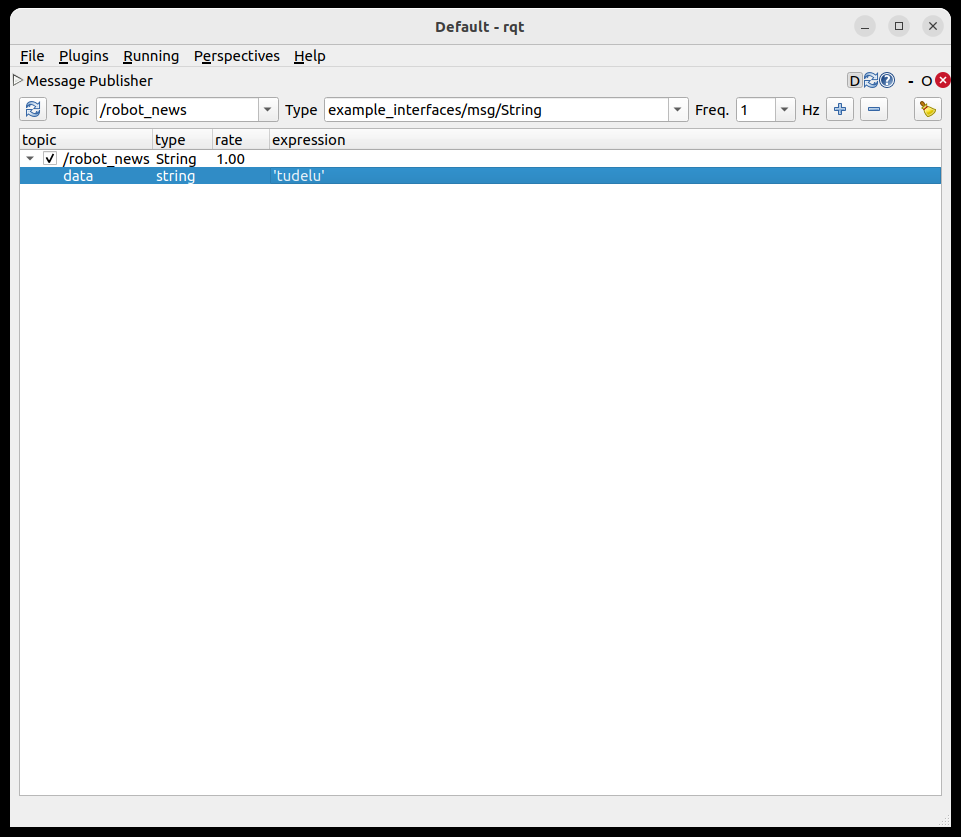
Menüpunkt
Plugins -> Topics -> Message Publisher
Services aufrufen (Service Caller)
Genauso einfach wie beim Publizieren von Messages kannst du mit RQt auch ROS2-Services aufrufen.
Beispiel Service:
self.server = self.create_service(AddTwoInts, "add_two_ints", self.callback_add_two_ints)Menüpunkt:
Plugins -> Services -> Service Caller
Node Graph: Beziehungen visualisieren
Mit dem Node Graph Plugin kannst du die Verbindungen zwischen Nodes, Publishern und Subscribern grafisch darstellen lassen.
Extrem hilfreich für das Verständnis komplexer ROS-Systeme.
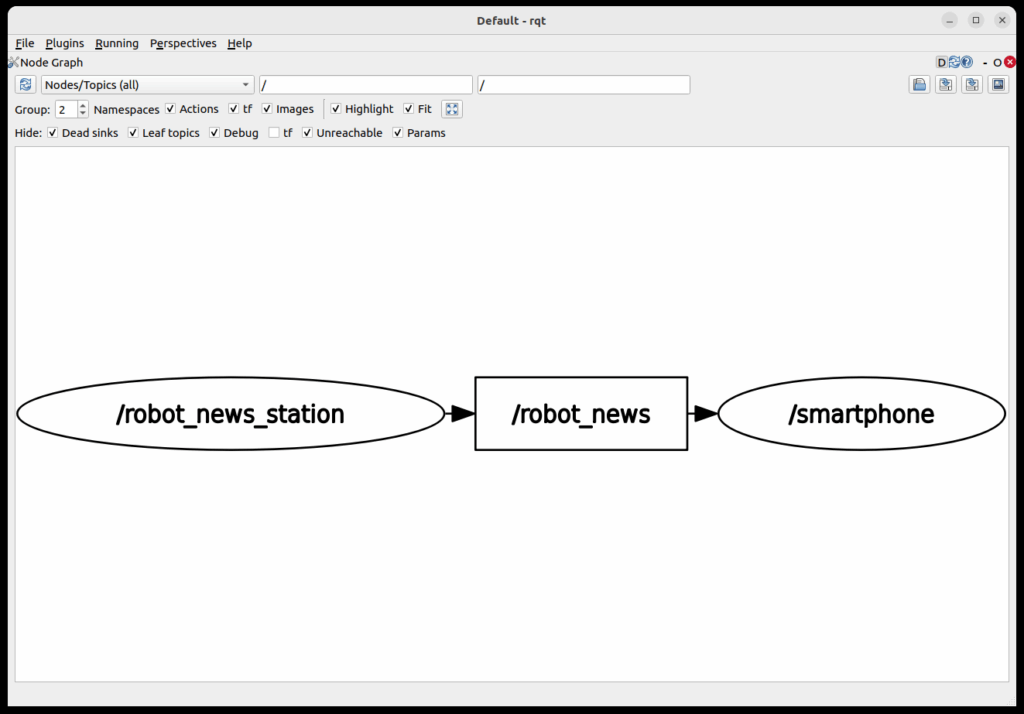
Menüpunkt:
Plugins -> Introspection -> Node Graph
Perspectives: Ansichten speichern
Wenn du dir deine bevorzugten Plugins und Fenster einmal zusammengestellt hast, kannst du diese Ansicht als sogenannte Perspective speichern. Praktisch für verschiedene Projekte oder Aufgaben!
Menüpunkt:
Perspectives -> Create Perspective
Reset: Wenn mal etwas klemmt
Falls RQt mal zickt oder die Fenster verschoben sind, kannst du die Konfiguration zurücksetzen:
rqt --clear-configFazit
RQt ist mehr als nur ein GUI-Tool – es ist ein echter Allrounder für ROS2-Entwickler:innen. Es hilft beim Debuggen,
Visualisieren, Kommunizieren mit Nodes und beim Service-Testen. Wer sich einmal eingearbeitet hat, will es nicht mehr missen.





